铰链关节构建器 更多...
#include <Mechatronics_HingeJointBuilder.hxx>
友元 | |
| class | _HingeJointBuilderBuilder |
额外继承的成员函数 | |
| Public 类型 继承自 NXOpen::Mechatronics::PhysicsJointBuilder | |
| enum | MotionTypes { MotionTypesDynamics , MotionTypesKinematics , MotionTypesArticulation } |
详细描述
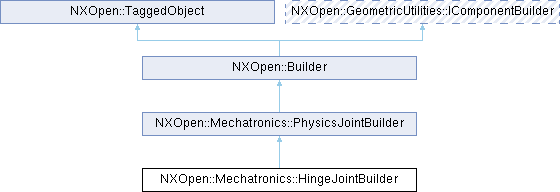
铰链关节构建器
表示一个 NXOpen::Mechatronics::HingeJoint 构建器。
要创建此类的新实例,请使用 NXOpen::Mechatronics::HingeJointCollection::CreateHingeJointBuilder
于NX7.5.1中创建。
成员函数说明
◆ AxisVector()
| NXOpen::Direction * NXOpen::Mechatronics::HingeJointBuilder::AxisVector | ( | ) |
获取轴线矢量。
于NX7.5.1中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
◆ EnableLowerLimit()
| bool NXOpen::Mechatronics::HingeJointBuilder::EnableLowerLimit | ( | ) |
获取下限选项。如果启用为 true,则关节在运动时将应用下限。
于NX10.0.0中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
◆ EnableUpperLimit()
| bool NXOpen::Mechatronics::HingeJointBuilder::EnableUpperLimit | ( | ) |
获取上限选项。如果启用为 true,则关节在运动时将应用上限。
于NX10.0.0中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
◆ LowerLimit()
| NXOpen::Expression * NXOpen::Mechatronics::HingeJointBuilder::LowerLimit | ( | ) |
获取下限。关节运动的下限设置。
于NX10.0.0中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
◆ Point()
| NXOpen::Point * NXOpen::Mechatronics::HingeJointBuilder::Point | ( | ) |
获取原点。
于NX7.5.1中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
◆ SetAxisVector()
| void NXOpen::Mechatronics::HingeJointBuilder::SetAxisVector | ( | NXOpen::Direction * | axisVector | ) |
设置轴线矢量。
于NX7.5.1中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
axisVector 轴线矢量
◆ SetEnableLowerLimit()
| void NXOpen::Mechatronics::HingeJointBuilder::SetEnableLowerLimit | ( | bool | enable | ) |
设置下限选项。如果启用为 true,则关节在运动时将应用下限。
于NX10.0.0中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
enable 启用
◆ SetEnableUpperLimit()
| void NXOpen::Mechatronics::HingeJointBuilder::SetEnableUpperLimit | ( | bool | enable | ) |
设置上限选项。如果启用为 true,则关节在运动时将应用上限。
于NX10.0.0中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
enable 启用
◆ SetPoint()
| void NXOpen::Mechatronics::HingeJointBuilder::SetPoint | ( | NXOpen::Point * | point | ) |
设置原点。
于NX7.5.1中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
point 原点
◆ StartAngle()
| NXOpen::Expression * NXOpen::Mechatronics::HingeJointBuilder::StartAngle | ( | ) |
获取起始角度。
于NX7.5.1中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")
◆ UpperLimit()
| NXOpen::Expression * NXOpen::Mechatronics::HingeJointBuilder::UpperLimit | ( | ) |
获取上限。关节运动的上限设置。
于NX10.0.0中创建。
许可证要求 : nx_mcd_core ("Mechatronics Concept Designer")