框架构建器 更多...
#include <Mechatronics_FrameBuilder.hxx>
Public 类型 | |
| enum | MotionTypes { MotionTypesPtp , MotionTypesLinear , MotionTypesCircular } |
Public 成员函数 | |
| NXOpen::Point * | CirclePoint () |
| NXOpen::Expression * | Duration () |
| int | FlybyRank () |
| NXOpen::CoordinateSystem * | Frame () |
| NXString | GetSpeedData () |
| NXOpen::Mechatronics::FrameBuilder::MotionTypes | MotionType () |
| NXString | Name () |
| void | SetCirclePoint (NXOpen::Point *point) |
| void | SetFlybyRank (int flybyRank) |
| void | SetFrame (NXOpen::CoordinateSystem *frame) |
| void | SetMotionType (NXOpen::Mechatronics::FrameBuilder::MotionTypes motionType) |
| void | SetName (const char *name) |
| void | SetName (const NXString &name) |
| void | SetSolutionIndex (int solutionIndex) |
| void | SetSpeedData (const char *speedData) |
| void | SetSpeedData (const NXString &speedData) |
| int | SolutionIndex () |
| Public 成员函数 继承自 NXOpen::Builder | |
| NXOpen::NXObject * | Commit () |
| void | Destroy () |
| std::vector< NXOpen::NXObject * > | GetCommittedObjects () |
| NXOpen::NXObject * | GetObject () |
| NXOpen::PreviewBuilder * | PreviewBuilder () |
| void | ShowResults () |
| virtual bool | Validate () |
| Public 成员函数 继承自 NXOpen::TaggedObject | |
| tag_t | Tag () const |
友元 | |
| class | _FrameBuilderBuilder |
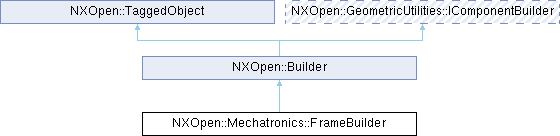
详细描述
框架构建器
表示包含方向和位置的框架。
要创建此类的新实例,请使用 NXOpen::Mechatronics::PhysicsManager::CreateFrameBuilder
创建于 NX1872.0.0。
成员枚举类型说明
◆ MotionTypes
成员函数说明
◆ CirclePoint()
| NXOpen::Point * NXOpen::Mechatronics::FrameBuilder::CirclePoint | ( | ) |
获取点。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ Duration()
| NXOpen::Expression * NXOpen::Mechatronics::FrameBuilder::Duration | ( | ) |
获取持续时间。
创建于 NX2306.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ FlybyRank()
| int NXOpen::Mechatronics::FrameBuilder::FlybyRank | ( | ) |
获取飞越等级。
创建于 NX2312.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ Frame()
| NXOpen::CoordinateSystem * NXOpen::Mechatronics::FrameBuilder::Frame | ( | ) |
获取框架。
创建于 NX1872.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ GetSpeedData()
| NXString NXOpen::Mechatronics::FrameBuilder::GetSpeedData | ( | ) |
获取配置文件中定义的机器人速度数据。
创建于 NX2312.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ MotionType()
| NXOpen::Mechatronics::FrameBuilder::MotionTypes NXOpen::Mechatronics::FrameBuilder::MotionType | ( | ) |
获取运动类型。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ Name()
| NXString NXOpen::Mechatronics::FrameBuilder::Name | ( | ) |
获取名称。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
◆ SetCirclePoint()
| void NXOpen::Mechatronics::FrameBuilder::SetCirclePoint | ( | NXOpen::Point * | point | ) |
设置点。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
point 点
◆ SetFlybyRank()
| void NXOpen::Mechatronics::FrameBuilder::SetFlybyRank | ( | int | flybyRank | ) |
设置飞越等级。
创建于 NX2312.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
flybyRank 飞越等级
◆ SetFrame()
| void NXOpen::Mechatronics::FrameBuilder::SetFrame | ( | NXOpen::CoordinateSystem * | frame | ) |
设置框架。
创建于 NX1872.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
frame 框架
◆ SetMotionType()
| void NXOpen::Mechatronics::FrameBuilder::SetMotionType | ( | NXOpen::Mechatronics::FrameBuilder::MotionTypes | motionType | ) |
设置运动类型。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
motionType 运动类型
◆ SetName() [1/2]
| void NXOpen::Mechatronics::FrameBuilder::SetName | ( | const char * | name | ) |
设置名称。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
name 名称
◆ SetName() [2/2]
| void NXOpen::Mechatronics::FrameBuilder::SetName | ( | const NXString & | name | ) |
设置名称。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
name 名称
◆ SetSolutionIndex()
| void NXOpen::Mechatronics::FrameBuilder::SetSolutionIndex | ( | int | solutionIndex | ) |
设置解。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
solutionIndex 解索引
◆ SetSpeedData() [1/2]
| void NXOpen::Mechatronics::FrameBuilder::SetSpeedData | ( | const char * | speedData | ) |
设置配置文件中定义的机器人速度数据。
创建于 NX2312.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
speedData 速度数据
◆ SetSpeedData() [2/2]
| void NXOpen::Mechatronics::FrameBuilder::SetSpeedData | ( | const NXString & | speedData | ) |
设置配置文件中定义的机器人速度数据。
创建于 NX2312.0.0。
许可要求:nx_mcd_core("机电概念设计器")
- 参数
-
speedData 速度数据
◆ SolutionIndex()
| int NXOpen::Mechatronics::FrameBuilder::SolutionIndex | ( | ) |
获取解。
创建于 NX2206.0.0。
许可要求:nx_mcd_core("机电概念设计器")