连杆构建器 更多...
#include <Motion_LinkBuilder.hxx>
友元 | |
| class | _LinkBuilderBuilder |
详细描述
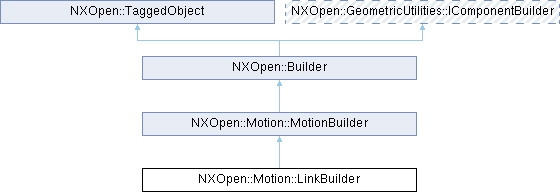
连杆构建器
表示一个 NXOpen::Motion::LinkBuilder
要创建此类的新实例,请使用 NXOpen::Motion::LinkCollection::CreateLinkBuilder
创建于NX5.0.0.
成员函数说明
◆ AdditionalGeometries()
| NXOpen::SelectNXObjectList * NXOpen::Motion::LinkBuilder::AdditionalGeometries | ( | ) |
返回附加几何,该几何仅应在连杆实例中使用
创建于NX1847.0.0.
许可证要求:无
◆ AdditionalGeometriesOvrCtrl()
| NXOpen::Motion::ParamOverrideState NXOpen::Motion::LinkBuilder::AdditionalGeometriesOvrCtrl | ( | ) |
返回附加连杆几何选择的覆盖状态,该状态仅应在连杆实例中使用。
创建于NX1847.0.0.
许可证要求:无
◆ Fixed()
| bool NXOpen::Motion::LinkBuilder::Fixed | ( | ) |
返回运动体是否固定于地面
创建于NX5.0.0.
许可证要求:无
◆ FixedOvrCtrl()
| NXOpen::Motion::ParamOverrideState NXOpen::Motion::LinkBuilder::FixedOvrCtrl | ( | ) |
返回运动体固定于地面的覆盖状态,该状态仅应在连杆实例中使用。
创建于NX1847.0.0.
许可证要求:无
◆ Geometries()
| NXOpen::SelectNXObjectList * NXOpen::Motion::LinkBuilder::Geometries | ( | ) |
返回原始几何,该几何仅应在连杆原型中可编辑,在连杆实例中可见
创建于NX5.0.0.
许可证要求:无
◆ InitialVelocity()
| NXOpen::Motion::LinkInitialVelocity * NXOpen::Motion::LinkBuilder::InitialVelocity | ( | ) |
返回初始速度
创建于NX5.0.0.
许可证要求:无
◆ MassProperty()
| NXOpen::Motion::LinkMassProperty * NXOpen::Motion::LinkBuilder::MassProperty | ( | ) |
返回质量属性
创建于NX5.0.0.
许可证要求:无
◆ Name()
| NXString NXOpen::Motion::LinkBuilder::Name | ( | ) |
返回名称
创建于NX5.0.0.
许可证要求:无
◆ SetAdditionalGeometriesOvrCtrl()
| void NXOpen::Motion::LinkBuilder::SetAdditionalGeometriesOvrCtrl | ( | NXOpen::Motion::ParamOverrideState | overrideState | ) |
设置附加连杆几何选择的覆盖状态,该状态仅应在连杆实例中使用。
创建于NX1847.0.0.
许可证要求:机构设计("MECHANISMS")
- 参数
-
overrideState 覆盖状态
◆ SetFixed()
| void NXOpen::Motion::LinkBuilder::SetFixed | ( | bool | fixed | ) |
设置运动体是否固定于地面
创建于NX5.0.0.
许可证要求:机构设计("MECHANISMS")
- 参数
-
fixed 固定
◆ SetFixedOvrCtrl()
| void NXOpen::Motion::LinkBuilder::SetFixedOvrCtrl | ( | NXOpen::Motion::ParamOverrideState | overrideState | ) |
设置运动体固定于地面的覆盖状态,该状态仅应在连杆实例中使用。
创建于NX1847.0.0.
许可证要求:机构设计("MECHANISMS")
- 参数
-
overrideState 覆盖状态
◆ SetName() [1/2]
| void NXOpen::Motion::LinkBuilder::SetName | ( | const char * | name | ) |
设置名称
创建于NX5.0.0.
许可证要求:机构设计("MECHANISMS")
- 参数
-
name 名称
◆ SetName() [2/2]
| void NXOpen::Motion::LinkBuilder::SetName | ( | const NXString & | name | ) |
设置名称
创建于NX5.0.0.
许可证要求:机构设计("MECHANISMS")
- 参数
-
name 名称