机电一体化构建器 更多...
#include <Motion_MechatronicsBuilder.hxx>
Public 类型 | |
| enum | Main { MainNo , MainYes } |
| enum | MechatronicsModelType { MechatronicsModelTypeAmesim , MechatronicsModelTypeSimulink , MechatronicsModelTypeGeneric , MechatronicsModelTypeFmi } |
| 机电模型类型 可能的值为 Simulink 或 Amesim 警告:从 Simcenter 2019.1 开始,Matlab 选项已更名为 Simulink 更多... | |
| enum | PurposeType { PurposeTypeImport , PurposeTypeExport } |
| enum | ReferenceObjectId { ReferenceObjectIdModalFile , ReferenceObjectIdHeaderFile , ReferenceObjectIdParameterFile } |
| enum | SolverCommunicationIntervalType { SolverCommunicationIntervalTypeConstant , SolverCommunicationIntervalTypeVariable } |
| enum | SolverCommunicationRunType { SolverCommunicationRunTypeSerial , SolverCommunicationRunTypeParallel } |
| enum | SolverIntegrationType { SolverIntegrationTypeCoSimulation , SolverIntegrationTypeModelExchange } |
| enum | SolverSimulationType { SolverSimulationTypeCoSimulation , SolverSimulationTypeModelExchange } |
友元 | |
| class | _MechatronicsBuilderBuilder |
详细描述
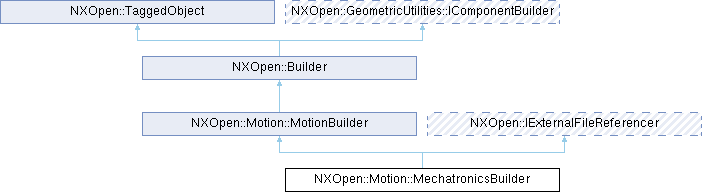
机电一体化构建器
表示 Motion::Mechatronics 构造器
要创建此类的新实例,请使用 NXOpen::Motion::MechatronicsCollection::CreateMechatronicsBuilder
默认值。
| 属性 | 值 |
|---|---|
| CommunicationInterval.Value | 0.01(毫米单位零件),0.01(英寸单位零件) |
| CommunicationIntervalType | 常量 |
| MechatronicsType | Amesim |
| Purpose | 导入 |
在 NX11.0.0 中创建。
成员枚举类型说明
◆ Main
◆ MechatronicsModelType
◆ PurposeType
◆ ReferenceObjectId
◆ SolverCommunicationIntervalType
◆ SolverCommunicationRunType
◆ SolverIntegrationType
◆ SolverSimulationType
成员函数说明
◆ ActiveParameterGroupName()
| NXString NXOpen::Motion::MechatronicsBuilder::ActiveParameterGroupName | ( | ) |
返回活动配置参数组名称
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
◆ ActivePortVariableGroupName()
| NXString NXOpen::Motion::MechatronicsBuilder::ActivePortVariableGroupName | ( | ) |
返回活动端口变量组名称
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
◆ CommunicationInterval()
| NXOpen::Expression * NXOpen::Motion::MechatronicsBuilder::CommunicationInterval | ( | ) |
返回通信间隔
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
◆ CommunicationIntervalType()
| NXOpen::Motion::MechatronicsBuilder::SolverCommunicationIntervalType NXOpen::Motion::MechatronicsBuilder::CommunicationIntervalType | ( | ) |
返回通信间隔类型 - 可能的值为Constant、Variable
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
◆ CommunicationRunType()
| NXOpen::Motion::MechatronicsBuilder::SolverCommunicationRunType NXOpen::Motion::MechatronicsBuilder::CommunicationRunType | ( | ) |
获取 Generic 和 FMI 的运行类型机电一体化元素 - 可能值为 Serial、Parallel
在 NX1872.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ ConfigurationParametersList()
| NXOpen::Motion::ConfigurationParameterList * NXOpen::Motion::MechatronicsBuilder::ConfigurationParametersList | ( | ) |
获取配置/监视参数列表
在 NX11.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ EstablishReference() [1/2]
|
virtual |
建立对给定文件规范的外部引用。
- 返回
- 外部文件引用对象
于 NX1847.0.0 中创建。
许可证要求:无
- 参数
-
referenceObjectId 如果引用方有多个外部引用,用于此引用的唯一标识符 referenceType 要建立的引用类型 externalFileSpec 外部文件规范。
◆ EstablishReference() [2/2]
|
virtual |
建立对给定文件规范的外部引用。
- 返回
- 外部文件引用对象
于 NX1847.0.0 中创建。
许可证要求:无
- 参数
-
referenceObjectId 如果引用方有多个外部引用,用于此引用的唯一标识符 referenceType 要建立的引用类型 externalFileSpec 外部文件规范。
◆ FunctionName()
| NXString NXOpen::Motion::MechatronicsBuilder::FunctionName | ( | ) |
返回通用和 FMI 的函数名称
于 NX1872.0.0 中创建。
许可证要求:机构 ("MECHANISMS")
◆ GetConfigurationParameter() [1/2]
| NXOpen::Motion::ConfigurationParameter * NXOpen::Motion::MechatronicsBuilder::GetConfigurationParameter | ( | const char * | inputName | ) |
在激活组中按名称搜索监视参数
在 NX11.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetConfigurationParameter() [2/2]
| NXOpen::Motion::ConfigurationParameter * NXOpen::Motion::MechatronicsBuilder::GetConfigurationParameter | ( | const NXString & | inputName | ) |
在激活组中按名称搜索监视参数
在 NX11.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetExternalFileDefinitionKey()
|
virtual |
获取外部文件适配器要使用的文件定义。
于 NX1847.0.0 中创建。
许可证要求:无
- 参数
-
adapter 外部文件引用对象
◆ GetExternalFileReferenceAdapter()
|
virtual |
返回外部文件引用对象。如果引用方对象有多个外部引用,使用 referenceObjectId 返回正确的外部文件适配器。
- 返回
- 外部文件引用对象
于 NX1847.0.0 中创建。
许可证要求:无
- 参数
-
referenceObjectId 当引用方有多个外部引用时所需的外部引用唯一标识符
◆ GetInput() [1/2]
| NXOpen::Motion::InputPortAssociation * NXOpen::Motion::MechatronicsBuilder::GetInput | ( | const char * | inputName | ) |
通过名称检索输入端口关联
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetInput() [2/2]
| NXOpen::Motion::InputPortAssociation * NXOpen::Motion::MechatronicsBuilder::GetInput | ( | const NXString & | inputName | ) |
通过名称检索输入端口关联
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetOutput() [1/2]
| NXOpen::Motion::OutputPortAssociation * NXOpen::Motion::MechatronicsBuilder::GetOutput | ( | const char * | inputName | ) |
通过名称检索输出端口关联
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetOutput() [2/2]
| NXOpen::Motion::OutputPortAssociation * NXOpen::Motion::MechatronicsBuilder::GetOutput | ( | const NXString & | inputName | ) |
通过名称检索输出端口关联
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetParameterGroupNames()
| std::vector< NXString > NXOpen::Motion::MechatronicsBuilder::GetParameterGroupNames | ( | ) |
允许检索可用配置参数组的名称列表
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
◆ GetPortVariable() [1/2]
| NXOpen::Motion::PortVariable * NXOpen::Motion::MechatronicsBuilder::GetPortVariable | ( | const char * | inputName | ) |
在活动组中按名称搜索监视变量
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetPortVariable() [2/2]
| NXOpen::Motion::PortVariable * NXOpen::Motion::MechatronicsBuilder::GetPortVariable | ( | const NXString & | inputName | ) |
在活动组中按名称搜索监视变量
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
inputName 输入名称
◆ GetPortVariableGroupNames()
| std::vector< NXString > NXOpen::Motion::MechatronicsBuilder::GetPortVariableGroupNames | ( | ) |
允许检索可用端口变量组的名称列表
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
◆ InputPortsListAmesimAndSimulink()
| NXOpen::Motion::InputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::InputPortsListAmesimAndSimulink | ( | ) |
获取 Amesim 和 Simulink 的输入端口列表
在 NX1872.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ InputPortsListExport()
| NXOpen::Motion::InputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::InputPortsListExport | ( | ) |
获取导出时的输入端口列表
在 NX1953.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ InputPortsListFMI()
| NXOpen::Motion::InputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::InputPortsListFMI | ( | ) |
获取 FMI 的输入端口列表
在 NX1953.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ InputPortsListGeneric()
| NXOpen::Motion::InputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::InputPortsListGeneric | ( | ) |
获取 Generic 的输入端口列表
在 NX1953.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ IsMain()
| NXOpen::Motion::MechatronicsBuilder::Main NXOpen::Motion::MechatronicsBuilder::IsMain | ( | ) |
获取表示 Generic 协同仿真是否为主的数值 - 可能值为 Yes 或 No
在 NX2206.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ MechatronicsType()
| NXOpen::Motion::MechatronicsBuilder::MechatronicsModelType NXOpen::Motion::MechatronicsBuilder::MechatronicsType | ( | ) |
返回机电一体化类型 - 可能的值为Simulink、Amesim、Generic或FMI
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
◆ Name()
| NXString NXOpen::Motion::MechatronicsBuilder::Name | ( | ) |
返回元素的名称
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
◆ NewInputListItem()
| NXOpen::Motion::InputPortAssociation * NXOpen::Motion::MechatronicsBuilder::NewInputListItem | ( | ) |
创建包含表达式的新输入列表项
- 返回
在 NX11.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ NewOutputListItem()
| NXOpen::Motion::OutputPortAssociation * NXOpen::Motion::MechatronicsBuilder::NewOutputListItem | ( | ) |
创建包含表达式的新输出列表项
- 返回
在 NX11.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ NumSolveIterations()
| int NXOpen::Motion::MechatronicsBuilder::NumSolveIterations | ( | ) |
返回通用和 FMI 的求解迭代次数
于 NX1872.0.0 中创建。
许可证要求:机构 ("MECHANISMS")
◆ OutputPortsListAmesimAndSimulink()
| NXOpen::Motion::OutputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::OutputPortsListAmesimAndSimulink | ( | ) |
获取 Amesim 和 Simulink 的输出端口列表
在 NX1872.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ OutputPortsListExport()
| NXOpen::Motion::OutputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::OutputPortsListExport | ( | ) |
获取导出时的输出端口列表
在 NX1953.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ OutputPortsListFMI()
| NXOpen::Motion::OutputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::OutputPortsListFMI | ( | ) |
获取 FMI 的输出端口列表
在 NX1953.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ OutputPortsListGeneric()
| NXOpen::Motion::OutputPortAssociationList * NXOpen::Motion::MechatronicsBuilder::OutputPortsListGeneric | ( | ) |
获取 Generic 的输出端口列表
在 NX1953.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ PortVariablesList()
| NXOpen::Motion::PortVariableList * NXOpen::Motion::MechatronicsBuilder::PortVariablesList | ( | ) |
获取监视变量列表
在 NX11.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
◆ Purpose()
| NXOpen::Motion::MechatronicsBuilder::PurposeType NXOpen::Motion::MechatronicsBuilder::Purpose | ( | ) |
返回机电一体化元素的用途 - 可能的值为Import、Export
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
◆ ReadInterfaceFromFile() [1/2]
| void NXOpen::Motion::MechatronicsBuilder::ReadInterfaceFromFile | ( | const char * | filePath | ) |
当用途指定为导出时,从外部文件读取机电一体化元素的输入/输出定义。 允许的文件类型为 .txt、.csv 和 Excel 文件
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
filePath 文件路径
◆ ReadInterfaceFromFile() [2/2]
| void NXOpen::Motion::MechatronicsBuilder::ReadInterfaceFromFile | ( | const NXString & | filePath | ) |
当用途指定为导出时,从外部文件读取机电一体化元素的输入/输出定义。 允许的文件类型为 .txt、.csv 和 Excel 文件
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
filePath 文件路径
◆ RefreshLists()
| void NXOpen::Motion::MechatronicsBuilder::RefreshLists | ( | ) |
从所选的头文件/模型文件更新可用输入和输出列表(针对 MATLAB 和 Amesim 模型)以及配置参数和端口变量列表(仅针对 Amesim)
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
◆ SetActiveParameterGroupName() [1/2]
| void NXOpen::Motion::MechatronicsBuilder::SetActiveParameterGroupName | ( | const char * | name | ) |
设置活动配置参数组名称
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
name 名称
◆ SetActiveParameterGroupName() [2/2]
| void NXOpen::Motion::MechatronicsBuilder::SetActiveParameterGroupName | ( | const NXString & | name | ) |
设置活动配置参数组名称
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
name 名称
◆ SetActivePortVariableGroupName() [1/2]
| void NXOpen::Motion::MechatronicsBuilder::SetActivePortVariableGroupName | ( | const char * | name | ) |
设置活动端口变量组名称
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
name 名称
◆ SetActivePortVariableGroupName() [2/2]
| void NXOpen::Motion::MechatronicsBuilder::SetActivePortVariableGroupName | ( | const NXString & | name | ) |
设置活动端口变量组名称
创建于 NX11.0.0.
许可证要求 : mechanisms ("MECHANISMS")
- 参数
-
name 名称
◆ SetCommunicationInterval()
| void NXOpen::Motion::MechatronicsBuilder::SetCommunicationInterval | ( | NXOpen::Expression * | communicationInterval | ) |
设置通信间隔
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
communicationInterval 通信间隔
◆ SetCommunicationIntervalType()
| void NXOpen::Motion::MechatronicsBuilder::SetCommunicationIntervalType | ( | NXOpen::Motion::MechatronicsBuilder::SolverCommunicationIntervalType | communicationIntervalType | ) |
设置通信间隔类型 - 可能的值为Constant、Variable
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
communicationIntervalType 通信间隔类型
◆ SetCommunicationRunType()
| void NXOpen::Motion::MechatronicsBuilder::SetCommunicationRunType | ( | NXOpen::Motion::MechatronicsBuilder::SolverCommunicationRunType | communicationRunType | ) |
设置 Generic 和 FMI 的运行类型机电一体化元素 - 可能值为 Serial、Parallel
在 NX1872.0.0 中创建。
许可证要求:mechanisms("MECHANISMS")
- 参数
-
communicationRunType 通信运行类型
◆ SetExternalFileReferenceAdapter()
|
virtual |
设置外部文件引用对象。如果引用方对象有多个外部引用,使用 referenceObjectId 设置正确的引用。
于 NX1847.0.0 中创建。
许可证要求:无
- 参数
-
referenceObjectId 当引用方有多个外部引用时所需的外部引用唯一标识符 adapter 外部文件引用对象
◆ SetFunctionName() [1/2]
| void NXOpen::Motion::MechatronicsBuilder::SetFunctionName | ( | const char * | functionName | ) |
设置通用和 FMI 的函数名称
于 NX1872.0.0 中创建。
许可证要求:机构 ("MECHANISMS")
- 参数
-
functionName 函数名称
◆ SetFunctionName() [2/2]
| void NXOpen::Motion::MechatronicsBuilder::SetFunctionName | ( | const NXString & | functionName | ) |
设置通用和 FMI 的函数名称
于 NX1872.0.0 中创建。
许可证要求:机构 ("MECHANISMS")
- 参数
-
functionName 函数名称
◆ SetMain()
| void NXOpen::Motion::MechatronicsBuilder::SetMain | ( | NXOpen::Motion::MechatronicsBuilder::Main | isMain | ) |
设置代表通用协同仿真是否为主的数值 - 可能值为是或否
于 NX2206.0.0 中创建。
许可证要求:机构 ("MECHANISMS")
- 参数
-
isMain 是否为主
◆ SetMechatronicsType()
| void NXOpen::Motion::MechatronicsBuilder::SetMechatronicsType | ( | NXOpen::Motion::MechatronicsBuilder::MechatronicsModelType | mechatronicsType | ) |
设置机电一体化类型 - 可能的值为Simulink、Amesim、Generic或FMI
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
mechatronicsType 机电一体化类型
◆ SetName() [1/2]
| void NXOpen::Motion::MechatronicsBuilder::SetName | ( | const char * | name | ) |
设置元素的名称
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
name 名称
◆ SetName() [2/2]
| void NXOpen::Motion::MechatronicsBuilder::SetName | ( | const NXString & | name | ) |
设置元素的名称
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
name 名称
◆ SetNumSolveIterations()
| void NXOpen::Motion::MechatronicsBuilder::SetNumSolveIterations | ( | int | numSolveIterations | ) |
设置通用和 FMI 的求解迭代次数
于 NX1872.0.0 中创建。
许可证要求:机构 ("MECHANISMS")
- 参数
-
numSolveIterations 求解迭代次数
◆ SetPurpose()
| void NXOpen::Motion::MechatronicsBuilder::SetPurpose | ( | NXOpen::Motion::MechatronicsBuilder::PurposeType | purpose | ) |
设置机电一体化元素的用途 - 可能的值为Import、Export
创建于NX11.0.0。
许可证要求:mechanisms ("MECHANISMS")
- 参数
-
purpose 用途