NXOpen::Mechatronics::PlanarJointBuilder类 参考
表示 NXOpen::Mechatronics::PlanarJoint 的构造器。
若要创建此类的新实例,请使用 NXOpen::Mechatronics::PlanarJointCollection::CreatePlanarJointBuilder
创建于 NX11.0.1 版本。
更多...
#include <Mechatronics_PlanarJointBuilder.hxx>
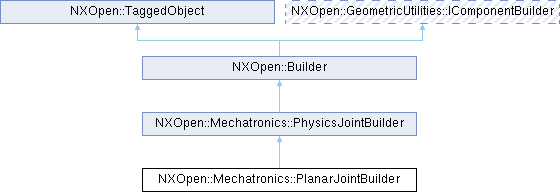
类 NXOpen::Mechatronics::PlanarJointBuilder 继承关系图:
友元 | |
| class | _PlanarJointBuilderBuilder |
额外继承的成员函数 | |
| Public 类型 继承自 NXOpen::Mechatronics::PhysicsJointBuilder | |
| enum | MotionTypes { MotionTypesDynamics , MotionTypesKinematics , MotionTypesArticulation } |
详细描述
表示 NXOpen::Mechatronics::PlanarJoint 的构造器。
若要创建此类的新实例,请使用 NXOpen::Mechatronics::PlanarJointCollection::CreatePlanarJointBuilder
创建于 NX11.0.1 版本。
平面关节构建器
成员函数说明
◆ AxisVector()
| NXOpen::Direction * NXOpen::Mechatronics::PlanarJointBuilder::AxisVector | ( | ) |
指定轴矢量的值。
创建于 NX11.0.0 版本。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
返回
◆ PointOrigin()
| NXOpen::Point * NXOpen::Mechatronics::PlanarJointBuilder::PointOrigin | ( | ) |
指示原点的值。
创建于 NX11.0.0 版本。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
返回
◆ SetAxisVector()
| void NXOpen::Mechatronics::PlanarJointBuilder::SetAxisVector | ( | NXOpen::Direction * | axisVector | ) |
指定轴矢量的值。
创建于 NX11.0.0 版本。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
设置
- 参数
-
axisVector 轴矢量
◆ SetPointOrigin()
| void NXOpen::Mechatronics::PlanarJointBuilder::SetPointOrigin | ( | NXOpen::Point * | origin | ) |
指示原点的值。
创建于 NX11.0.0 版本。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
设置
- 参数
-
origin 原点