关节微动器构建器 更多...
#include <Mechatronics_JointJoggerBuilder.hxx>
友元 | |
| class | _JointJoggerBuilderBuilder |
详细描述
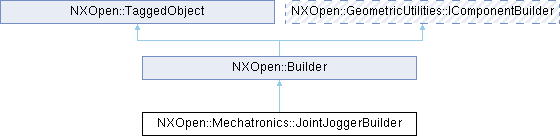
关节微动器构建器
表示 NXOpen::Mechatronics::JointJoggerBuilder 。
若要创建此类的新实例,请使用 NXOpen::Mechatronics::JointJoggerCollection::CreateJointJoggerBuilder
于 NX1899.0.0 版本创建。
成员函数说明
◆ AddJointData()
| void NXOpen::Mechatronics::JointJoggerBuilder::AddJointData | ( | NXOpen::NXObject * | joint | ) |
添加关节数据。
于 NX1899.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
joint 旋转关节、滑动关节、圆柱关节或螺旋关节
◆ CreatePoseCsys()
| NXOpen::CoordinateSystem * NXOpen::Mechatronics::JointJoggerBuilder::CreatePoseCsys | ( | const NXOpen::Point3d & | origin, |
| const NXOpen::Vector3d & | xdir, | ||
| const NXOpen::Vector3d & | ydir ) |
创建位姿坐标系。
于 NX2007.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
origin 原点 xdir X 方向向量 ydir Y 方向向量
◆ EditJointAngle()
| void NXOpen::Mechatronics::JointJoggerBuilder::EditJointAngle | ( | NXOpen::NXObject * | joint, |
| double | angleValue ) |
编辑关节角度。
于 NX1899.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
joint 旋转关节或圆柱关节 angleValue 角度值
◆ EditJointDistance()
| void NXOpen::Mechatronics::JointJoggerBuilder::EditJointDistance | ( | NXOpen::NXObject * | joint, |
| double | distanceValue ) |
编辑关节距离。
于 NX1899.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
joint 滑动关节、圆柱关节或螺旋关节 distanceValue 距离值
◆ GenerateOperation()
| bool NXOpen::Mechatronics::JointJoggerBuilder::GenerateOperation | ( | ) |
返回是否生成位置控件和操作的选项。
于 NX2007.0.0 版本创建。
许可要求:无
◆ GenerateTargetCSYS()
| bool NXOpen::Mechatronics::JointJoggerBuilder::GenerateTargetCSYS | ( | ) |
返回是否生成目标坐标系的选项。
于 NX2007.0.0 版本创建。
许可要求:无
◆ GetLinkedJoints()
| void NXOpen::Mechatronics::JointJoggerBuilder::GetLinkedJoints | ( | NXOpen::NXObject * | rigid, |
| std::vector< NXOpen::NXObject * > & | linkedJoints ) |
从刚体获取关联的关节。
于 NX2007.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
rigid 刚体 linkedJoints 关联关节
◆ Name()
| NXString NXOpen::Mechatronics::JointJoggerBuilder::Name | ( | ) |
返回名称。
于 NX1899.0.0 版本创建。
许可要求:无
◆ RemoveJointData()
| void NXOpen::Mechatronics::JointJoggerBuilder::RemoveJointData | ( | NXOpen::NXObject * | joint | ) |
移除关节数据。
于 NX1899.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
joint 旋转关节、滑动关节、圆柱关节或螺旋关节
◆ RigidBody()
| NXOpen::Mechatronics::SelectRigidBody * NXOpen::Mechatronics::JointJoggerBuilder::RigidBody | ( | ) |
返回用于识别关节链的刚体,为可选属性。
于 NX2007.0.0 版本创建。
许可要求:无
◆ SetGenerateOperation()
| void NXOpen::Mechatronics::JointJoggerBuilder::SetGenerateOperation | ( | bool | generateOperation | ) |
设置是否生成位置控件和操作的选项。
于 NX2007.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
generateOperation 是否生成操作
◆ SetGenerateTargetCSYS()
| void NXOpen::Mechatronics::JointJoggerBuilder::SetGenerateTargetCSYS | ( | bool | generateTargetCSYS | ) |
设置是否生成目标坐标系的选项。
于 NX2007.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
generateTargetCSYS 是否生成目标坐标系
◆ SetName() [1/2]
| void NXOpen::Mechatronics::JointJoggerBuilder::SetName | ( | const char * | name | ) |
设置名称。
于 NX1899.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
name 名称
◆ SetName() [2/2]
| void NXOpen::Mechatronics::JointJoggerBuilder::SetName | ( | const NXString & | name | ) |
设置名称。
于 NX1899.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
name 名称
◆ SetTargetCSYS()
| void NXOpen::Mechatronics::JointJoggerBuilder::SetTargetCSYS | ( | NXOpen::CoordinateSystem * | targetCSYS | ) |
设置目标坐标系。
于 NX2007.0.0 版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
targetCSYS 目标坐标系
◆ TargetCSYS()
| NXOpen::CoordinateSystem * NXOpen::Mechatronics::JointJoggerBuilder::TargetCSYS | ( | ) |
返回目标坐标系。
于 NX2007.0.0 版本创建。
许可要求:无