位置控制构建器类 更多...
#include <Mechatronics_PositionControlBuilder.hxx>
友元 | |
| class | _PositionControlBuilderBuilder |
详细描述
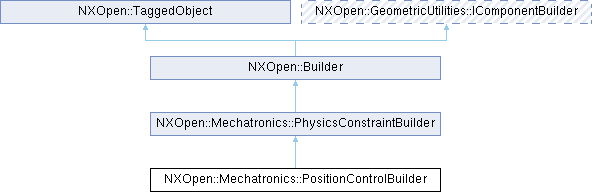
位置控制构建器类
表示 NXOpen::Mechatronics::PositionControlBuilder 。
要创建此类的新实例,请使用 NXOpen::Mechatronics::PositionControlCollection::CreatePositionControlBuilder
创建于NX7.5.1。
成员枚举类型说明
◆ AngularPathOptions
◆ Axis
◆ ClosedCurvePathOptions
成员函数说明
◆ AngularPath()
| NXOpen::Mechatronics::PositionControlBuilder::AngularPathOptions NXOpen::Mechatronics::PositionControlBuilder::AngularPath | ( | ) |
返回角路径。
于NX8.0.0版本创建。
许可要求:无
◆ AxisJoint()
| NXOpen::Mechatronics::SelectPhysicsJoint * NXOpen::Mechatronics::PositionControlBuilder::AxisJoint | ( | ) |
返回关节选择。该关节可以是 NXOpen::Mechatronics::HingeJoint 、NXOpen::Mechatronics::SlidingJoint 、NXOpen::Mechatronics::CylindricalJoint 和 NXOpen::Mechatronics::TransportSurface 。
创建于NX7.5.1。
许可证要求 : 无
◆ AxisType()
| NXOpen::Mechatronics::PositionControlBuilder::Axis NXOpen::Mechatronics::PositionControlBuilder::AxisType | ( | ) |
返回轴类型。
于NX7.5.1版本创建。
许可要求:无
◆ ClosedCurvePath()
| NXOpen::Mechatronics::PositionControlBuilder::ClosedCurvePathOptions NXOpen::Mechatronics::PositionControlBuilder::ClosedCurvePath | ( | ) |
返回闭合曲线路径选项。
于NX1899.0.0版本创建。
许可要求:无
◆ Destination()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::Destination | ( | ) |
返回目标位置。
于NX7.5.1版本创建。
许可要求:无
◆ DirectionType()
| NXOpen::Mechatronics::SpeedPositionControlDirectiontype NXOpen::Mechatronics::PositionControlBuilder::DirectionType | ( | ) |
返回方向类型,仅当使用位置控制驱动NXOpen::Mechatronics::TransportSurface时有效
于NX10.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
◆ EnableLimitForce()
| bool NXOpen::Mechatronics::PositionControlBuilder::EnableLimitForce | ( | ) |
返回是否启用极限力。
于NX9.0.0版本创建。
许可要求:nx_mcd_core ("Mechatronics Concept Designer")
◆ ForwardForce()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::ForwardForce | ( | ) |
返回速度控制可施加的最大力。
于NX9.0.0版本创建。
许可要求:无
◆ LimitJerk()
| bool NXOpen::Mechatronics::PositionControlBuilder::LimitJerk | ( | ) |
返回是否限制加加速度的标志,用于控制位置控制是否包含加加速度数据。
于NX9.0.0版本创建。
许可要求:无
◆ MaxAcceleration()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::MaxAcceleration | ( | ) |
返回最大加速度,用于设置位置控制的最大加速度。
于NX9.0.0版本创建。
许可要求:无
◆ MaxDeceleration()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::MaxDeceleration | ( | ) |
返回最大减速度,用于设置位置控制的最大减速度。
于NX9.0.0版本创建。
许可要求:无
◆ MaxJerk()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::MaxJerk | ( | ) |
返回最大加加速度,用于设置位置控制的最大加加速度。
于NX9.0.0版本创建。
许可要求:无
◆ ParameterType()
| NXOpen::Mechatronics::SpeedPositionControlBuilderTargetparameter NXOpen::Mechatronics::PositionControlBuilder::ParameterType | ( | ) |
返回动态材质参数类型,仅当使用位置控制驱动NXOpen::Mechatronics::DynamicMaterial时有效
于NX1980.0.0版本创建。
许可要求:无
◆ ReverseForce()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::ReverseForce | ( | ) |
返回速度控制可施加的最小力。
于NX9.0.0版本创建。
许可要求:无
◆ SetAngularPath()
| void NXOpen::Mechatronics::PositionControlBuilder::SetAngularPath | ( | NXOpen::Mechatronics::PositionControlBuilder::AngularPathOptions | angularPath | ) |
设置角路径。
于NX8.0.0版本创建。
许可要求:nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
angularPath 角路径
◆ SetAxisJoint()
| void NXOpen::Mechatronics::PositionControlBuilder::SetAxisJoint | ( | NXOpen::NXObject * | axisJoint | ) |
设置关节。
创建于NX7.5.1。
许可证要求 : nx_mcd_core ("机械电子概念设计器")
- 参数
-
axisJoint 轴关节
◆ SetAxisType()
| void NXOpen::Mechatronics::PositionControlBuilder::SetAxisType | ( | NXOpen::Mechatronics::PositionControlBuilder::Axis | axisType | ) |
设置轴类型。
于NX7.5.1版本创建。
许可要求:nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
axisType 轴类型
◆ SetClosedCurvePath()
| void NXOpen::Mechatronics::PositionControlBuilder::SetClosedCurvePath | ( | NXOpen::Mechatronics::PositionControlBuilder::ClosedCurvePathOptions | closedCurvePath | ) |
设置闭合曲线路径选项。
于NX1899.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
closedCurvePath closedcurvepath
◆ SetDirectionType()
| void NXOpen::Mechatronics::PositionControlBuilder::SetDirectionType | ( | NXOpen::Mechatronics::SpeedPositionControlDirectiontype | directionType | ) |
设置方向类型,仅当使用位置控制驱动NXOpen::Mechatronics::TransportSurface时有效
于NX10.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
directionType directiontype
◆ SetEnableLimitForce()
| void NXOpen::Mechatronics::PositionControlBuilder::SetEnableLimitForce | ( | bool | enable | ) |
设置是否启用极限力。
于NX9.0.0版本创建。
许可要求:nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
enable 是否启用
◆ SetLimitJerk()
| void NXOpen::Mechatronics::PositionControlBuilder::SetLimitJerk | ( | bool | limitJerk | ) |
设置是否限制加加速度的标志,用于控制位置控制是否包含加加速度数据。
于NX9.0.0版本创建。
许可要求:nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
limitJerk 是否限制加加速度标志
◆ SetParameterType()
| void NXOpen::Mechatronics::PositionControlBuilder::SetParameterType | ( | NXOpen::Mechatronics::SpeedPositionControlBuilderTargetparameter | parameterType | ) |
设置动态材质参数类型,仅当使用位置控制驱动NXOpen::Mechatronics::DynamicMaterial时有效
于NX1980.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
parameterType parametertype
◆ SetSignal()
| void NXOpen::Mechatronics::PositionControlBuilder::SetSignal | ( | NXOpen::NXObject * | signal | ) |
设置信号
于NX2312.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
signal signal
◆ SetTarget()
| void NXOpen::Mechatronics::PositionControlBuilder::SetTarget | ( | NXOpen::Expression * | targetExp | ) |
设置要控制的目标表达式。
于NX1980.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
targetExp targetexp
◆ SetUseAcceleration()
| void NXOpen::Mechatronics::PositionControlBuilder::SetUseAcceleration | ( | bool | useAcceleration | ) |
设置是否使用加速度的标志,用于控制位置控制是否包含加速度数据。
于NX9.0.0版本创建。
许可要求:nx_mcd_core ("Mechatronics Concept Designer")
- 参数
-
useAcceleration 是否使用加速度标志
◆ SetUseExternalData()
| void NXOpen::Mechatronics::PositionControlBuilder::SetUseExternalData | ( | bool | useExternalData | ) |
设置是否使用外部数据的标志,用于控制位置控制数据是否来自外部。
于NX1872.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
- 参数
-
useExternalData useexternaldata
◆ Signal()
| NXOpen::SelectNXObject * NXOpen::Mechatronics::PositionControlBuilder::Signal | ( | ) |
返回信号选择。可以是NXOpen::Mechatronics::Signal 或NXOpen::Mechatronics::AdapterSignal。
于NX12.0.0版本创建。
许可要求:nx_mcd_core("Mechatronics Concept Designer")
◆ Speed()
| NXOpen::Expression * NXOpen::Mechatronics::PositionControlBuilder::Speed | ( | ) |
返回速度。
于NX7.5.1版本创建。
许可要求:无
◆ UseAcceleration()
| bool NXOpen::Mechatronics::PositionControlBuilder::UseAcceleration | ( | ) |
返回是否使用加速度的标志,用于控制位置控制是否包含加速度数据。
于NX9.0.0版本创建。
许可要求:无
◆ UseExternalData()
| bool NXOpen::Mechatronics::PositionControlBuilder::UseExternalData | ( | ) |
返回是否使用外部数据的标志,用于控制位置控制数据是否来自外部。
于NX1872.0.0版本创建。
许可要求:无